Dispersion Handling¶
It is common to use chirped probe pulses in visible fs-pump-probe spectroscopy. This results in a wavelength depended time-zero, since the different probe wavelength arrive at different times at the sample. The chirp is generally well modeled by a low-order polynomial. Therefore to work with dispersion affected spectra, it is necessary to know to dispersion curve.restr
There are various ways to measure the dispersion directly. Alternatively, one can estimate the dispersion directly form the data. The estimate can used to correct the spectrum directly, or if the dispersion is explicitly part of the fitted model, used as the starting guess.
Estimation of the dispersion from the data¶
skultrafast can estimate the dispersion by first using a heuristic which estimates the time-zero for each wavelengths. The resulting curve is then fitted with a polynomial using a robust fitting method. The robust method is necessary since the heuristics are error-prone.
Heuristics¶
skultrafast comes with different heuristics to estimate the time-zero from a
single trace. The heuristic functions are located in the zero_finding
module. Additionally, user-given heuristics are supported. Working directly with
the functions should not be necessary, when using the
TimeResSpec class.
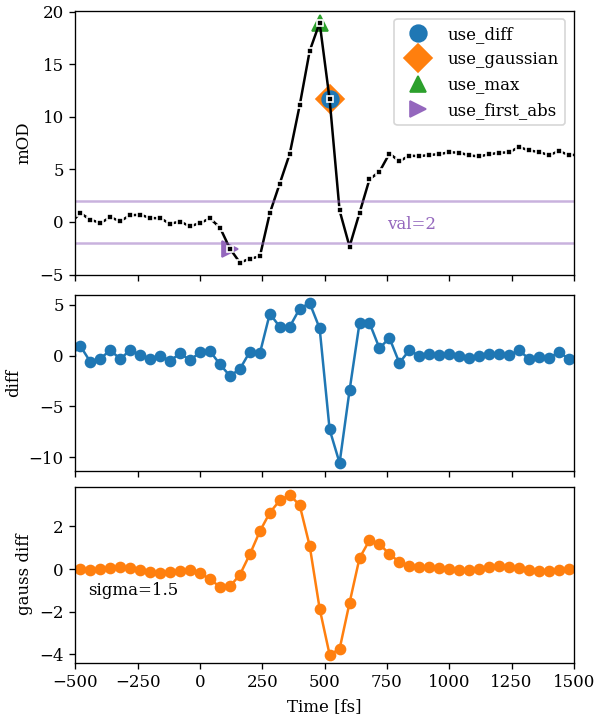
use_diff, returns the index where the largest signal change is located.use_max, returns the index with the largest positive signal. This useful when the cross-phase modulation or two-photon contributions are strong, e.g. when measuring solvent signals.use_gaussian, returns the index where the convolution with the first derivative of an gaussian is the largest. This works like a averaged version ofuse_diff.use_first_abs, returns the earliest index where the absolute of the signal is above a given threshold. The methods works best when the threshold is small, therefore indicating the first signal contributions above the noise floor. This captures the dispersion curve quite well, minus a slight offset, since it captures the beginning of the pump-probe interaction.
The image below compares the results of the different heuristics on a real signal. The signal has strong coherent contributions.
(Source code, svg, png)
{kind=link}
{kind=link}

The top figure shows a signal and resulting estimates for the different
heuristics. The horizontal lines mark the value used by the use_first_abs
method. The middle figure shows the difference between sequential points,
use_diff just returns the absolute argmax of this differences. The bottom
figure shows the convolution with the first derivative of a gaussian with the
signal. Again, use_gaussian just returns the absolute argmax of the
convolution. The sigma is given in data-points.
Since the signal show strong coherent effects, the use_max method is the
method of choice for this trace. But on other wavelengths, the non-coherent
signal is stronger and that method may fail. Since both methods based on
derivatives differ only by one point and are less suspisusceptible may be the
better choice. Looking at the figure, one may be thinking that the
use_first_abs heuristic is useless, because it is clearly giving an too
early estimatation. But since happens for almost all signals, the heuristic is
very useful since it reproduces the (offsetted) dispersion curve quite well.
Robust fitting¶
In the second step, the resulting \(t_0(\omega)\) data is approximated with a polynomial of low degree, using a robust fitting method form statsmodels. The regression of the time-zeros uses wavenumbers as the depend variable, since the dispersion is proportional to the frequency.
Using the estimate¶
There are three different ways to use the resulting dispersion curve.
Use linear interpolation to correct the dispersion. Here, for every channel we interpolate the data by shift the data-points from (t, y) to (t - disp(wl), y_new).
The new values are used to generate binning borders, which are then used to generate the new t-vector.
We fit a full model in which the dispersion is explicitly modeled.
For a quick exploration, I recommend the first method. An interpolated dataset is necessary for plotting spectra and maps anyway.